 | |
| Manufacturer | SRI International |
|---|---|
| Year of creation | 1985 |
| Derived from | Shakey the robot |
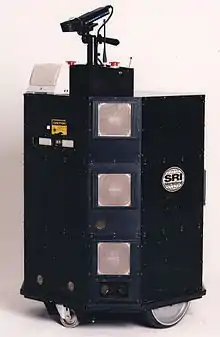
Flakey the robot was a research robot created at SRI International's Artificial Intelligence Center and was the successor to Shakey the robot. It is featured in a Scientific American Frontiers episode (Season 5, Episode 1).[1]
Software
Most of Flakey's routines were written in Lisp, with some lower-level code written in C.[2] The code maintains a "Local Perceptual Space" that is updated by the sensors and acted on by planning algorithms.[3]
Hardware
It was about 3 feet tall and 2 feet wide, and included 12 sonar sensors, optical wheel encoders, a video camera, and a depth-finding laser.[4]
Research results
Flakey was used to demonstrate fuzzy logic and goal-oriented behavior - it would take what it knew and work towards one of several goals.[5] At the first AAAI robotics competition in July 1992, Flakey took second place and the University of Michigan's CARMEL took first, above Georgia Tech's "Buzz" and IBM's "TJ2".[2][5]
References
- ↑ Scientific American Frontiers, Season 5, Episode 01: Life’s Big Questions, Released on 1994-10-05. See a transcript here and a video here.
- 1 2 University of Michigan; SRI International (1994). "CARMEL vs. Flakey: A Comparison of Two Robots". CiteSeerX 10.1.1.87.1641.
{{cite journal}}: Cite journal requires|journal=(help) - ↑ Saffiotti, Alessandro. "Some Notes on the Integration of Planning and Reactivity in Autonomous Mobile Robots" (PDF). SRI International. Retrieved 2013-03-06.
{{cite journal}}: Cite journal requires|journal=(help) - ↑ Mims, Jim. "Flakey". Alp Centauri. Retrieved 2013-03-06.
- 1 2 Saffiotti, Alessandro; Ruspini, E.; Konolige, Kurt G. (March 1993). "A Fuzzy Controller For Flakey, An Autonomous Mobile Robot". SRI International. Archived from the original on 2013-04-03. Retrieved 2013-03-06.
{{cite journal}}: Cite journal requires|journal=(help)