In differential geometry, a subject of mathematics, a symplectic manifold is a smooth manifold, , equipped with a closed nondegenerate differential 2-form , called the symplectic form. The study of symplectic manifolds is called symplectic geometry or symplectic topology. Symplectic manifolds arise naturally in abstract formulations of classical mechanics and analytical mechanics as the cotangent bundles of manifolds. For example, in the Hamiltonian formulation of classical mechanics, which provides one of the major motivations for the field, the set of all possible configurations of a system is modeled as a manifold, and this manifold's cotangent bundle describes the phase space of the system.


Motivation
Symplectic manifolds arise from classical mechanics; in particular, they are a generalization of the phase space of a closed system.[1] In the same way the Hamilton equations allow one to derive the time evolution of a system from a set of differential equations, the symplectic form should allow one to obtain a vector field describing the flow of the system from the differential of a Hamiltonian function .[2] So we require a linear map from the tangent manifold to the cotangent manifold , or equivalently, an element of . Letting denote a section of , the requirement that be non-degenerate ensures that for every differential there is a unique corresponding vector field such that . Since one desires the Hamiltonian to be constant along flow lines, one should have , which implies that is alternating and hence a 2-form. Finally, one makes the requirement that should not change under flow lines, i.e. that the Lie derivative of along vanishes. Applying Cartan's formula, this amounts to (here is the interior product):











so that, on repeating this argument for different smooth functions such that the corresponding span the tangent space at each point the argument is applied at, we see that the requirement for the vanishing Lie derivative along flows of corresponding to arbitrary smooth is equivalent to the requirement that ω should be closed.
Definition
A symplectic form on a smooth manifold is a closed non-degenerate differential 2-form .[3][4] Here, non-degenerate means that for every point , the skew-symmetric pairing on the tangent space defined by is non-degenerate. That is to say, if there exists an such that for all , then . Since in odd dimensions, skew-symmetric matrices are always singular, the requirement that be nondegenerate implies that has an even dimension.[3][4] The closed condition means that the exterior derivative of vanishes. A symplectic manifold is a pair where is a smooth manifold and is a symplectic form. Assigning a symplectic form to is referred to as giving a symplectic structure.







Examples
Symplectic vector spaces
Let be a basis for We define our symplectic form ω on this basis as follows:



In this case the symplectic form reduces to a simple quadratic form. If In denotes the n × n identity matrix then the matrix, Ω, of this quadratic form is given by the 2n × 2n block matrix:

Cotangent bundles
Let be a smooth manifold of dimension . Then the total space of the cotangent bundle has a natural symplectic form, called the Poincaré two-form or the canonical symplectic form




Here are any local coordinates on and are fibrewise coordinates with respect to the cotangent vectors . Cotangent bundles are the natural phase spaces of classical mechanics. The point of distinguishing upper and lower indexes is driven by the case of the manifold having a metric tensor, as is the case for Riemannian manifolds. Upper and lower indexes transform contra and covariantly under a change of coordinate frames. The phrase "fibrewise coordinates with respect to the cotangent vectors" is meant to convey that the momenta are "soldered" to the velocities . The soldering is an expression of the idea that velocity and momentum are colinear, in that both move in the same direction, and differ by a scale factor.





Kähler manifolds
A Kähler manifold is a symplectic manifold equipped with a compatible integrable complex structure. They form a particular class of complex manifolds. A large class of examples come from complex algebraic geometry. Any smooth complex projective variety has a symplectic form which is the restriction of the Fubini—Study form on the projective space .


Almost-complex manifolds
Riemannian manifolds with an -compatible almost complex structure are termed almost-complex manifolds. They generalize Kähler manifolds, in that they need not be integrable. That is, they do not necessarily arise from a complex structure on the manifold.
Lagrangian and other submanifolds
There are several natural geometric notions of submanifold of a symplectic manifold :
- Symplectic submanifolds of (potentially of any even dimension) are submanifolds such that is a symplectic form on .
- Isotropic submanifolds are submanifolds where the symplectic form restricts to zero, i.e. each tangent space is an isotropic subspace of the ambient manifold's tangent space. Similarly, if each tangent subspace to a submanifold is co-isotropic (the dual of an isotropic subspace), the submanifold is called co-isotropic.
- Lagrangian submanifolds of a symplectic manifold are submanifolds where the restriction of the symplectic form to is vanishing, i.e. and . Lagrangian submanifolds are the maximal isotropic submanifolds.






One major example is that the graph of a symplectomorphism in the product symplectic manifold (M × M, ω × −ω) is Lagrangian. Their intersections display rigidity properties not possessed by smooth manifolds; the Arnold conjecture gives the sum of the submanifold's Betti numbers as a lower bound for the number of self intersections of a smooth Lagrangian submanifold, rather than the Euler characteristic in the smooth case.
Examples
Let have global coordinates labelled . Then, we can equip with the canonical symplectic form



There is a standard Lagrangian submanifold given by . The form vanishes on because given any pair of tangent vectors we have that To elucidate, consider the case . Then, and . Notice that when we expand this out








both terms we have a factor, which is 0, by definition.

Example: Cotangent bundle
The cotangent bundle of a manifold is locally modeled on a space similar to the first example. It can be shown that we can glue these affine symplectic forms hence this bundle forms a symplectic manifold. A less trivial example of a Lagrangian submanifold is the zero section of the cotangent bundle of a manifold. For example, let

Then, we can present as


where we are treating the symbols as coordinates of . We can consider the subset where the coordinates and , giving us the zero section. This example can be repeated for any manifold defined by the vanishing locus of smooth functions and their differentials .






Example: Parametric submanifold
Consider the canonical space with coordinates . A parametric submanifold of is one that is parameterized by coordinates such that





This manifold is a Lagrangian submanifold if the Lagrange bracket vanishes for all . That is, it is Lagrangian if
![{\displaystyle [u_{i},u_{j}]}](../I/6da389e02c29e4641852d216064d9c298080c348.svg)

![{\displaystyle [u_{i},u_{j}]=\sum _{k}{\frac {\partial q_{k}}{\partial u_{i}}}{\frac {\partial p_{k}}{\partial u_{j}}}-{\frac {\partial p_{k}}{\partial u_{i}}}{\frac {\partial q_{k}}{\partial u_{j}}}=0}](../I/71429d998cca8689d6b3aa76d1bc5d8fec517478.svg)
for all . This can be seen by expanding

in the condition for a Lagrangian submanifold . This is that the symplectic form must vanish on the tangent manifold ; that is, it must vanish for all tangent vectors:


for all . Simplify the result by making use of the canonical symplectic form on :

and all others vanishing.
As local charts on a symplectic manifold take on the canonical form, this example suggests that Lagrangian submanifolds are relatively unconstrained. The classification of symplectic manifolds is done via Floer homology—this is an application of Morse theory to the action functional for maps between Lagrangian submanifolds. In physics, the action describes the time evolution of a physical system; here, it can be taken as the description of the dynamics of branes.
Example: Morse theory
Another useful class of Lagrangian submanifolds occur in Morse theory. Given a Morse function and for a small enough one can construct a Lagrangian submanifold given by the vanishing locus . For a generic Morse function we have a Lagrangian intersection given by .




Special Lagrangian submanifolds
In the case of Kähler manifolds (or Calabi–Yau manifolds) we can make a choice on as a holomorphic n-form, where is the real part and imaginary. A Lagrangian submanifold is called special if in addition to the above Lagrangian condition the restriction to is vanishing. In other words, the real part restricted on leads the volume form on . The following examples are known as special Lagrangian submanifolds,



- complex Lagrangian submanifolds of hyperkähler manifolds,
- fixed points of a real structure of Calabi–Yau manifolds.
The SYZ conjecture deals with the study of special Lagrangian submanifolds in mirror symmetry; see (Hitchin 1999).
The Thomas–Yau conjecture predicts that the existence of a special Lagrangian submanifolds on Calabi–Yau manifolds in Hamiltonian isotopy classes of Lagrangians is equivalent to stability with respect to a stability condition on the Fukaya category of the manifold.
Lagrangian fibration
A Lagrangian fibration of a symplectic manifold M is a fibration where all of the fibres are Lagrangian submanifolds. Since M is even-dimensional we can take local coordinates (p1,…,pn, q1,…,qn), and by Darboux's theorem the symplectic form ω can be, at least locally, written as ω = ∑ dpk ∧ dqk, where d denotes the exterior derivative and ∧ denotes the exterior product. This form is called the Poincaré two-form or the canonical two-form. Using this set-up we can locally think of M as being the cotangent bundle and the Lagrangian fibration as the trivial fibration This is the canonical picture.


Lagrangian mapping
Let L be a Lagrangian submanifold of a symplectic manifold (K,ω) given by an immersion i : L ↪ K (i is called a Lagrangian immersion). Let π : K ↠ B give a Lagrangian fibration of K. The composite (π ∘ i) : L ↪ K ↠ B is a Lagrangian mapping. The critical value set of π ∘ i is called a caustic.
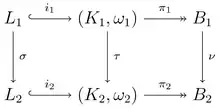
Two Lagrangian maps (π1 ∘ i1) : L1 ↪ K1 ↠ B1 and (π2 ∘ i2) : L2 ↪ K2 ↠ B2 are called Lagrangian equivalent if there exist diffeomorphisms σ, τ and ν such that both sides of the diagram given on the right commute, and τ preserves the symplectic form.[4] Symbolically:

where τ∗ω2 denotes the pull back of ω2 by τ.
Special cases and generalizations
- A symplectic manifold is exact if the symplectic form is exact. For example, the cotangent bundle of a smooth manifold is an exact symplectic manifold. The canonical symplectic form is exact.
- A symplectic manifold endowed with a metric that is compatible with the symplectic form is an almost Kähler manifold in the sense that the tangent bundle has an almost complex structure, but this need not be integrable.
- Symplectic manifolds are special cases of a Poisson manifold.
- A multisymplectic manifold of degree k is a manifold equipped with a closed nondegenerate k-form.[5]
- A polysymplectic manifold is a Legendre bundle provided with a polysymplectic tangent-valued -form; it is utilized in Hamiltonian field theory.[6]

See also
- Almost symplectic manifold – differentiable manifold equipped with a nondegenerate (but not necessarily closed) 2‐form
- Contact manifold – Branch of geometry—an odd-dimensional counterpart of the symplectic manifold.
- Covariant Hamiltonian field theory – Formalism in classical field theory based on Hamiltonian mechanics
- Fedosov manifold
- Poisson bracket – Operation in Hamiltonian mechanics
- Symplectic group – Mathematical group
- Symplectic matrix
- Symplectic topology – Branch of differential geometry and differential topology
- Symplectic vector space – vector space equipped with an alternating nondegenerate bilinear form
- Symplectomorphism – Isomorphism of symplectic manifolds
- Tautological one-form – canonical differential form defined on the cotangent bundle of a smooth manifold
- Wirtinger inequality (2-forms) – inequality applicable to 2-forms
Citations
- ↑ Webster, Ben (9 January 2012). "What is a symplectic manifold, really?".
- ↑ Cohn, Henry. "Why symplectic geometry is the natural setting for classical mechanics".
- 1 2 de Gosson, Maurice (2006). Symplectic Geometry and Quantum Mechanics. Basel: Birkhäuser Verlag. p. 10. ISBN 3-7643-7574-4.
- 1 2 3 Arnold, V. I.; Varchenko, A. N.; Gusein-Zade, S. M. (1985). The Classification of Critical Points, Caustics and Wave Fronts: Singularities of Differentiable Maps, Vol 1. Birkhäuser. ISBN 0-8176-3187-9.
- ↑ Cantrijn, F.; Ibort, L. A.; de León, M. (1999). "On the Geometry of Multisymplectic Manifolds". J. Austral. Math. Soc. Ser. A. 66 (3): 303–330. doi:10.1017/S1446788700036636.
- ↑ Giachetta, G.; Mangiarotti, L.; Sardanashvily, G. (1999). "Covariant Hamiltonian equations for field theory". Journal of Physics. A32 (38): 6629–6642. arXiv:hep-th/9904062. Bibcode:1999JPhA...32.6629G. doi:10.1088/0305-4470/32/38/302. S2CID 204899025.
General and cited references
- McDuff, Dusa; Salamon, D. (1998). Introduction to Symplectic Topology. Oxford Mathematical Monographs. ISBN 0-19-850451-9.
- Auroux, Denis. "Seminar on Mirror Symmetry".
- Meinrenken, Eckhard. "Symplectic Geometry" (PDF).
- Abraham, Ralph; Marsden, Jerrold E. (1978). Foundations of Mechanics. London: Benjamin-Cummings. See Section 3.2. ISBN 0-8053-0102-X.
- de Gosson, Maurice A. (2006). Symplectic Geometry and Quantum Mechanics. Basel: Birkhäuser Verlag. ISBN 3-7643-7574-4.
- Alan Weinstein (1971). "Symplectic manifolds and their lagrangian submanifolds". Advances in Mathematics. 6 (3): 329–46. doi:10.1016/0001-8708(71)90020-X.
- Arnold, V. I. (1990). "Ch.1, Symplectic geometry". Singularities of Caustics and Wave Fronts. Mathematics and Its Applications. Vol. 62. Dordrecht: Springer Netherlands. doi:10.1007/978-94-011-3330-2. ISBN 978-1-4020-0333-2. OCLC 22509804.
Further reading
- Dunin-Barkowski, Petr (2022). "Symplectic duality for topological recursion". arXiv:2206.14792 [math-ph].
- "How to find Lagrangian Submanifolds". Stack Exchange. December 17, 2014.
- Lumist, Ü. (2001) [1994], "Symplectic Structure", Encyclopedia of Mathematics, EMS Press
- Sardanashvily, G. (2009). "Fibre bundles, jet manifolds and Lagrangian theory". Lectures for Theoreticians. arXiv:0908.1886.
- McDuff, D. (November 1998). "Symplectic Structures—A New Approach to Geometry" (PDF). Notices of the AMS.
- Hitchin, Nigel (1999). "Lectures on Special Lagrangian Submanifolds". arXiv:math/9907034.